Project Stardust: Adventures in Rocket Landing Technology
2020 - 2022
Ever since SpaceX first landed their Falcon 9 booster, I've been fascinated by the idea of propulsive landing. The sight of a rocket gracefully descending from the sky and landing on its feet seemed like something straight out of science fiction. This fascination led to Project Stardust - my attempt to explore and understand the technology behind propulsive landing on a much smaller scale.
The Idea
The goal was simple: build a small flying device that could demonstrate the principles of propulsive landing. While using existing quadcopters might have seemed like an easy solution, they don't actually reflect how rockets work. Quadcopters control their flight by varying the speed of different propellers, but rockets need to use different methods - thrust vectoring, control surfaces, or similar techniques. This meant starting from scratch with a custom design.
The Journey
First Steps
My first design was... well, let's say ambitious but impractical. Everything was modeled as one big piece, which looked great in CAD but would have been a nightmare to maintain or modify. This version never made it past the drawing board, but it taught me an important lesson about modularity in design.

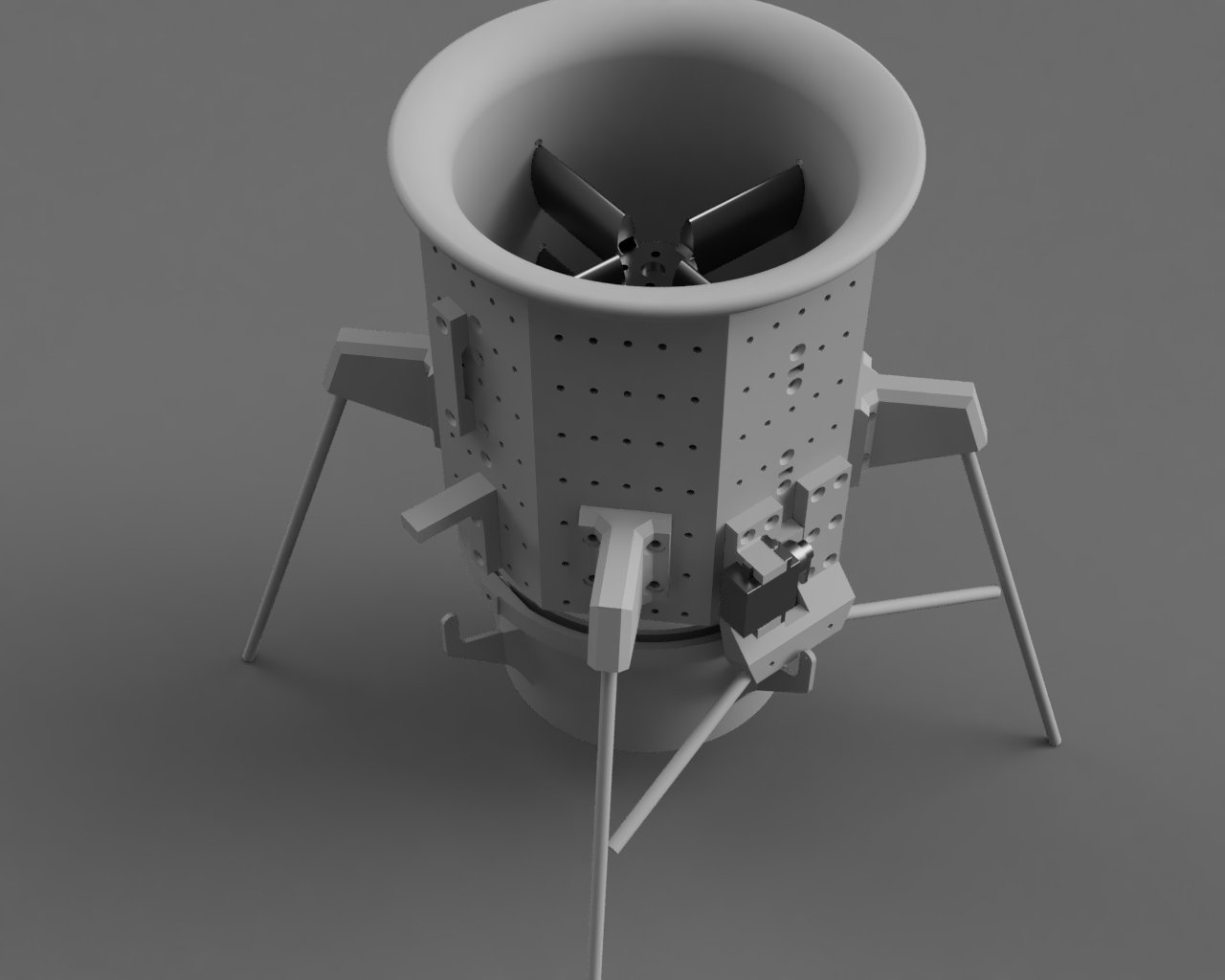
Version2: Getting real
The second version was much more practical. Taking lessons from the first attempt, everything was designed to be bolted together, making it easy to swap out parts or make modifications. Instead of control fins, this version used a vectored nozzle for control - similar to how some rockets steer their thrust. While it looked promising on paper and was successfully built using 3D printing, there were some issues:
- The thrust-to-weight ratio wasn't quite there - it simply couldn't lift itself
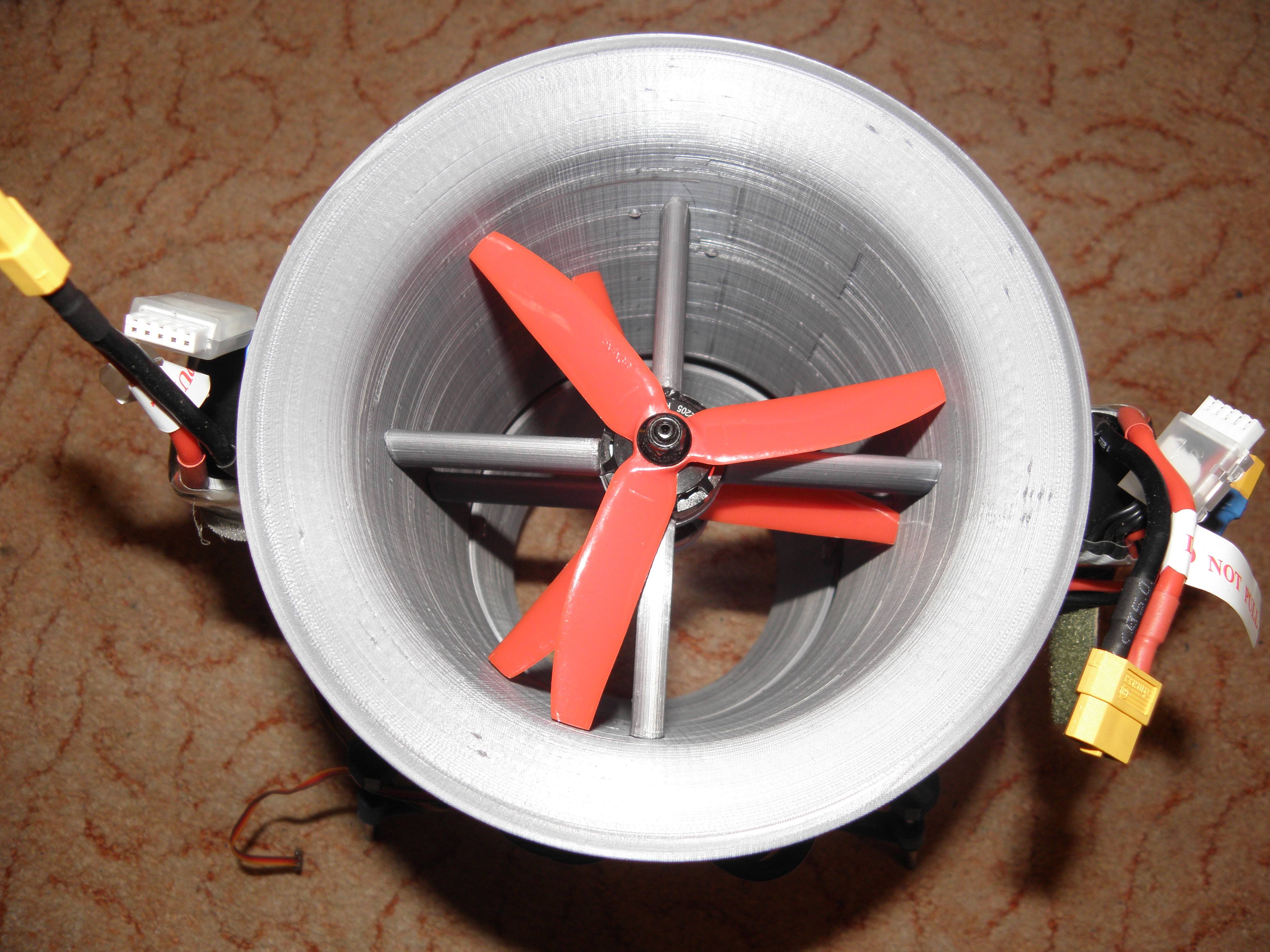
- The coaxial blade setup (two propellers stacked on top of each other) created more noise than thrust
- Efficiency wasn't great due to the propeller interference

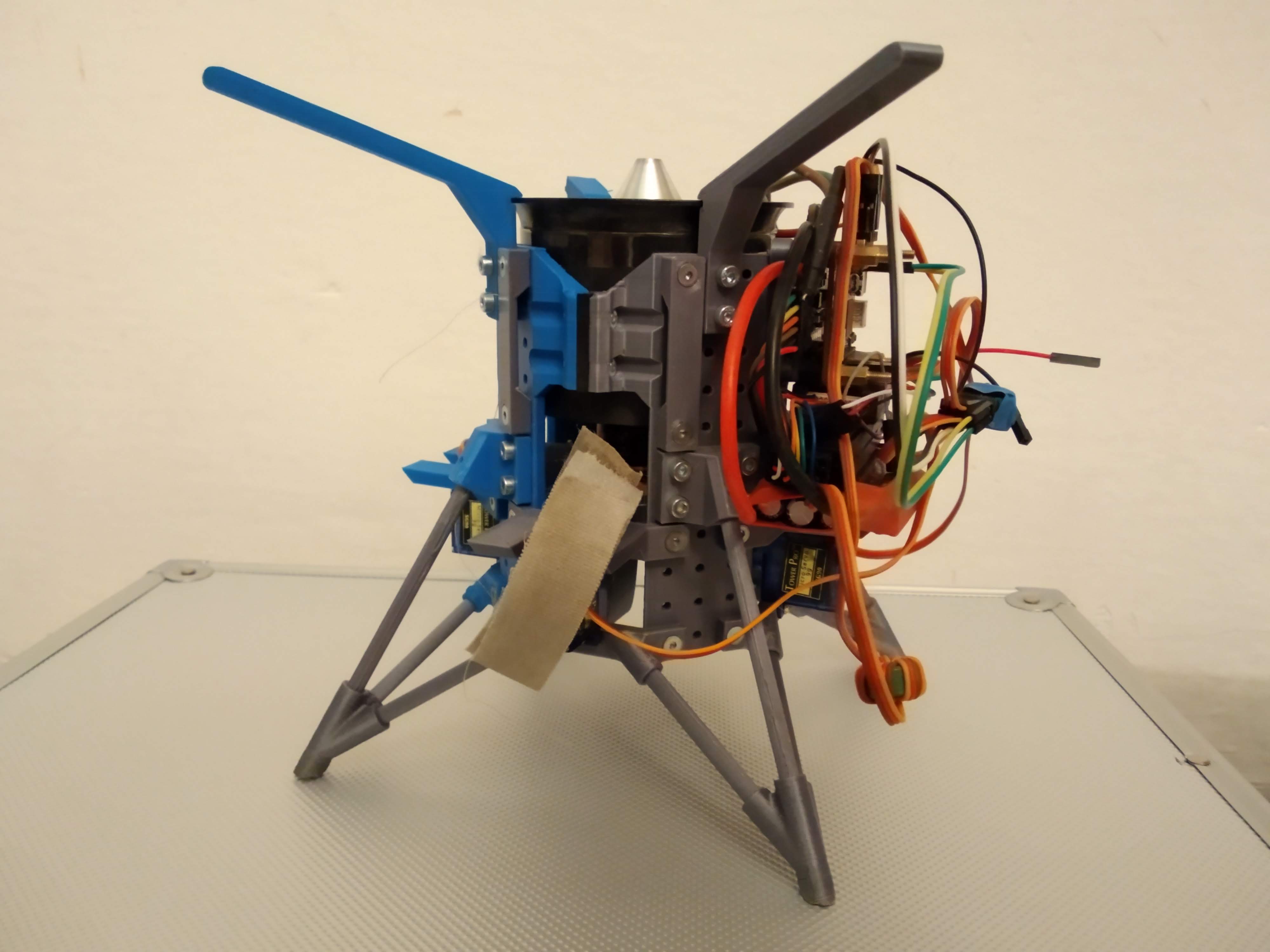
Version 3: Third Time's the Charm
The final version took a different approach. Out went the coaxial propellers, in came a single, powerful Electric Ducted Fan (EDF). Control fins made a return, giving full control over the vehicle's attitude. This version actually achieved lift-off! However, it revealed new challenges:
- Stability was tricky to maintain
- The control fins needed careful adjustment
- A proper test rig was definitely needed for safe testing
Technical Deep Dive
The heart of Project Stardust lay in the intricate dance between propulsion, control, and design. Each element presented its own challenges and led to fascinating discoveries along the way.
The propulsion system went through several major iterations, each teaching valuable lessons. Initially, I experimented with coaxial propellers - think two propellers stacked on top of each other, spinning in opposite directions. While this setup promised good stability and efficient use of space, reality proved more challenging. The propellers interfered with each other, creating noise and reducing efficiency. The switch to a single Electric Ducted Fan (EDF) in the final version was a game-changer, offering cleaner airflow and more thrust in a compact package.
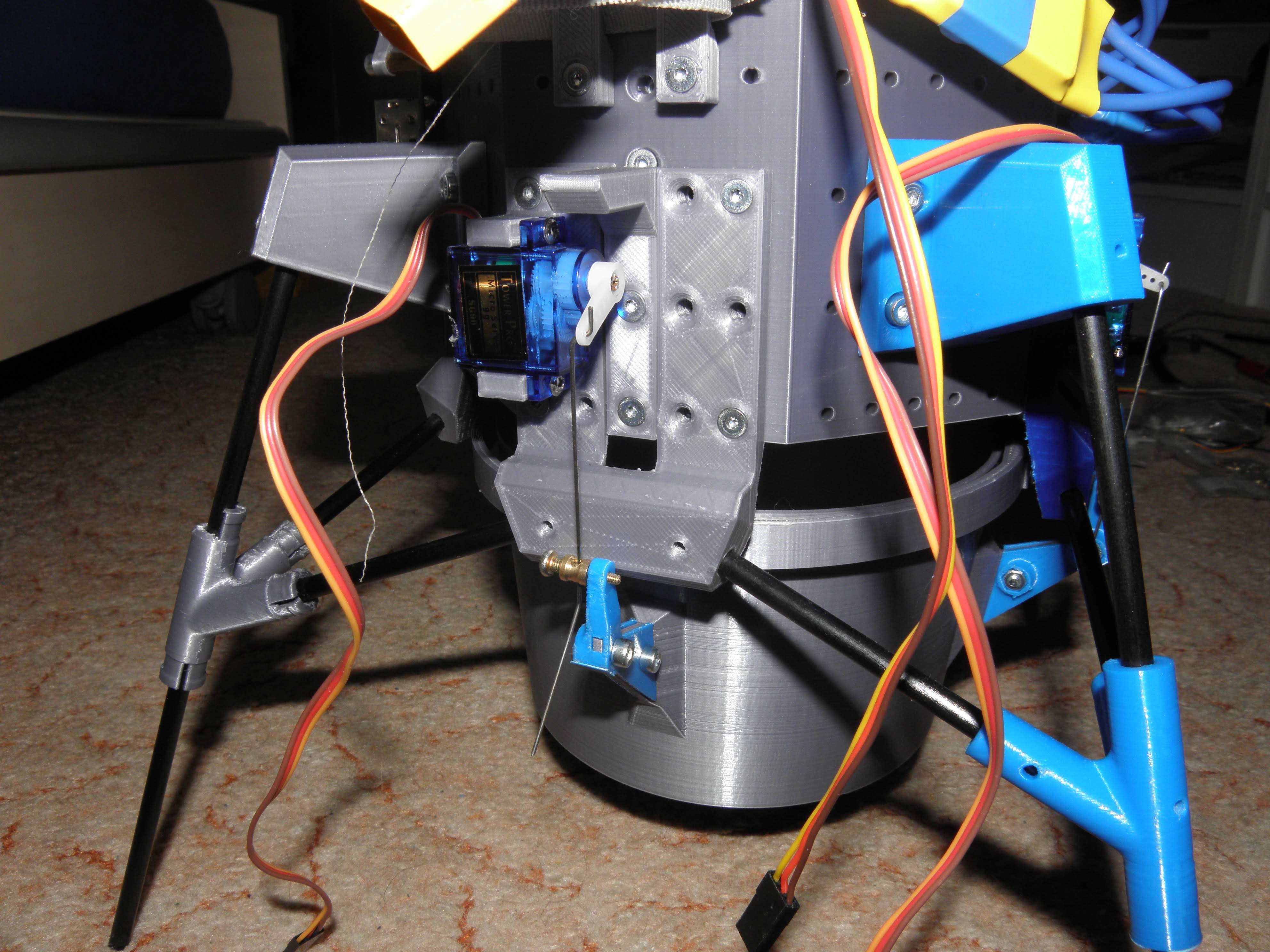
Control mechanisms evolved alongside the propulsion system. The early design used thrust vectoring, similar to what you might see on a real rocket, where the direction of thrust can be changed to control the vehicle's attitude. Later versions explored aerodynamic control surfaces - essentially small fins that could redirect the airflow. Each approach had its merits: thrust vectoring offered precise control but added complexity, while control surfaces were simpler but required sufficient airspeed to be effective.
Perhaps the most interesting aspect was the design philosophy that emerged throughout the project. 3D printing proved invaluable, allowing rapid iteration and testing of new ideas. This led to a modular design approach where components could be easily swapped out or modified. Need to test a different control surface design? Print a new one and bolt it on. Propulsion system not performing as expected? Design and print a new mount. This flexibility was crucial for experimentation, though it came with its own challenges in maintaining structural integrity while keeping weight down.
The project constantly balanced competing demands: the need for power versus weight limitations, control precision versus system complexity, and theoretical elegance versus practical feasibility. Each decision in one area rippled through the others, creating a fascinating optimization puzzle that evolved with each iteration.
What I Learned
This project was an incredible learning experience. It taught me about:
- The real-world challenges of propulsive landing systems
- The importance of iterative design
- The complexity of control systems
- The value of starting simple and building up
While active development has ended, the project achieved its main goal: providing hands-on experience with the principles behind propulsive landing technology. The lessons learned here could be valuable for future projects, whether they're in aerospace or other fields requiring precise control and stability.
Looking Forward
While I'm no longer actively developing Project Stardust, the potential for future exploration is exciting. Some interesting areas for anyone wanting to take this further might include:
- Advanced control systems for more precise landing
- Better sensors for position and attitude control
- Autonomous landing capabilities
- Scaling up to larger systems
The journey from concept to flying prototype was filled with challenges, setbacks, and victories. While not every test was successful, each one provided valuable insights into the complex world of propulsive landing technology.